Interaction Residency – day One part1
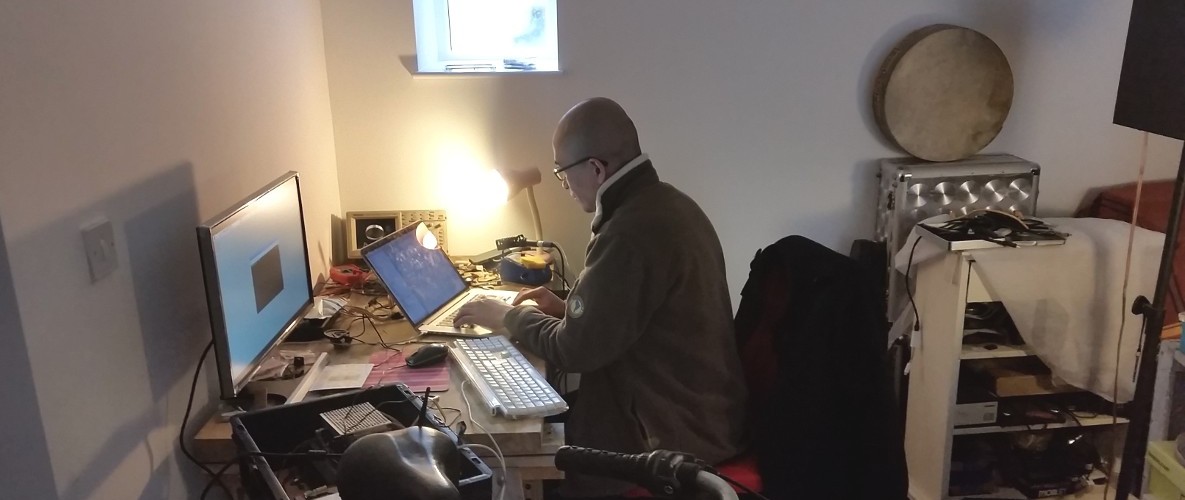
We are delighted to welcome Sukander Kartadinata who has come to work with us on developing the sonic bike into more of an instrument. Our first aim is to enable the rider to play the sound from the bike by how they ride. Not just to trigger a different sample in a different way, but to allow for example the rider to cycle through a sound or synthesize it directly by their pedalling. The potential is vast and we have 4 days so we decide to be simple and work step by step.
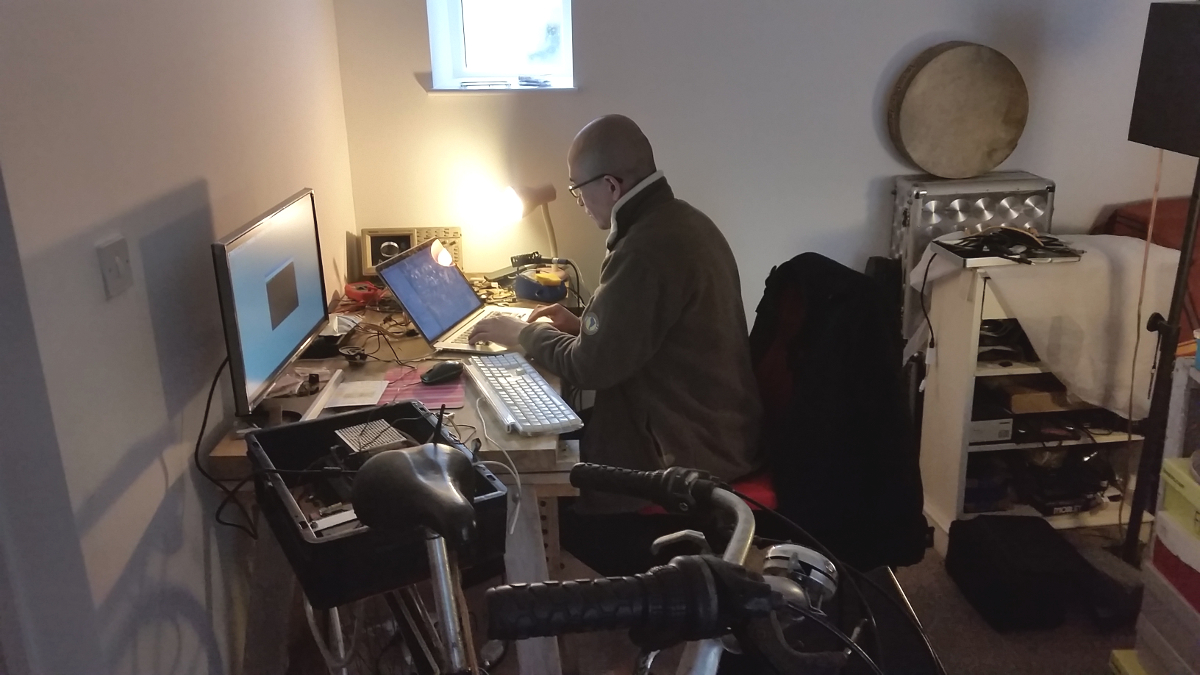
Initially, we classify the bicycle instrument. Building on from our current sonic bike v.3 system , the Bicycle Instrument has an IMU (sensehat) mounted on the Raspberry Pi2. This contains a selection of gyroscopes and accelerometers to measure pitch, roll and yaw as well as sensor data which provides temperature, humidity and air pressure. The software we’ll work from is the Sonic Kayak system Dave has been developing which we successfully played with in Kernow last week. This sys already has Pd implemented as the audio processor, with different mapped zones being used to instruct the application of different patches rather than just trigger different samples.
We plan this week to one by one build and install different sensors onto the bike before building the next. Pd is our processing software so fine tuning within the hard and the soft not just in the lab but on the bike riding in the street has to be realised before that sensor can be ticked off and we can move onto the next. Then we will integrate the sensors into the zone based Sonic Kayak map system as described above. Note to self, #bicrophonic play performs in the outdoors!


{kind=link}