Interaction Residency – day Two
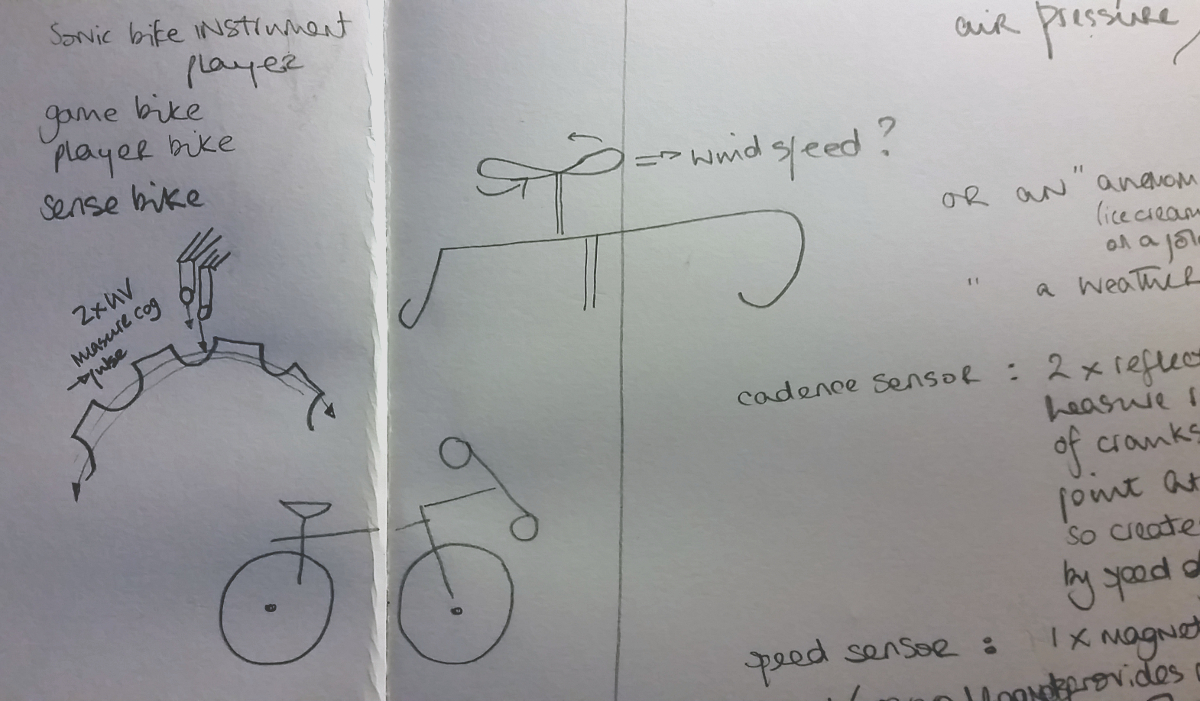
It’s windy and raining and the cadence sensor is – check above- exciting. The sound that is being play-cycled are chimps calling and the developing soft is ‘chimpsprocket’. We’re aware we need to test outside to ensure its viability but with the lashing storm instead get down to the kit box design and a review on the amount of power the current sonic bike system really needs.
Historically, 12V was necessary to produce enough mA/h to run a 350W stereo Kenwood car amp as well as the beagleboard. Now with self-powered speakers, there’s only the Pi and any USB peripherals such as GPS receiver, audio dongle, microcontroller, sense hat etc so the power demands are much less. We’re also now using Lipo batteries which are small and efficient but need much care on maintenance and charging. If the battery is to stay inside the box to charge, it also needs to have its cells balanced which require another connection. Currently we don’t have that inbuilt to the sonic bike kit box and any balancing requires the battery to be removed.
Sukander proposes to research the power demand versus time required to stay charged plus cost of lipos with smaller voltage but higher mA/h. The weather inspires discussion around environmental sensors especially wind speed/direction..